Using microstepping helps a lot, but I went further.
I use dither stepping, where microstepping and digital
signal processing are combined directly with cybernetics
to give smooth silent movement to the motor.
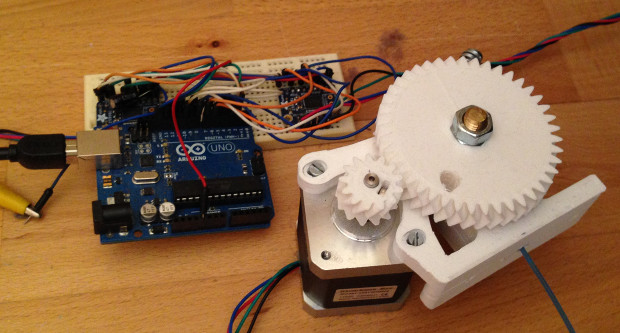
In the beginning I used microstepper controllers, but they have
been replaced with H-bridges driving the stepper motors
directly. They are controlled by an Atmel microcontroller which
in the background runs my interrupt based driver routine. It
uses negative positional feedback with smooth bessel filters
implemented as coupled differential equations.
It is fast
too, and do not use much of the processing power.